Kinematic Tricycle Drive component class. More...
#include <RRKinematicTricycleDriveComponent.h>
Inheritance diagram for URRKinematicTricycleDriveComponent:
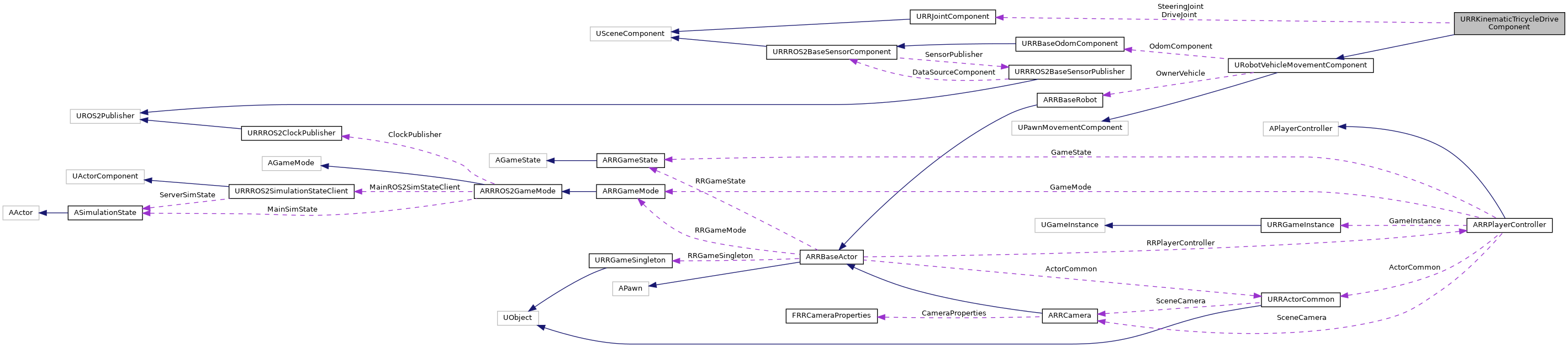
Collaboration diagram for URRKinematicTricycleDriveComponent:
Public Member Functions | |
| void | BeginPlay () |
| void | TickComponent (float InDeltaTime, enum ELevelTick TickType, FActorComponentTickFunction *ThisTickFunction) |
| Call UpdateMovement, and UpdateComponentVelocity. More... | |
| void | SetDriveJoints (URRJointComponent *InSteeringJoint, URRJointComponent *InDriveJoint) |
 Public Member Functions inherited from URobotVehicleMovementComponent Public Member Functions inherited from URobotVehicleMovementComponent | |
| void | InitAIMovementComp () |
| Init AIMovementComp, which drives the robot kinematically using UE AI Navigation. More... | |
| virtual void | SetUpdatedComponent (USceneComponent *InNewUpdatedComponent) override |
| Assign a #USceneComponent as #UpdatedComponent. More... | |
| virtual void | Initialize () |
| Initialize noise and odometry. More... | |
| virtual void | InitData () |
| Call #InitOdom, Calculate MinDistanceToFloor, and. More... | |
| void | SetMovingPlatform (AActor *platform) |
| bool | IsOnMovingPlatform () |
| void | RemoveMovingPlatform () |
Public Attributes | |
| URRJointComponent * | SteeringJoint = nullptr |
| URRJointComponent * | DriveJoint = nullptr |
| float | WheelRadius = 12.7f |
| float | WheelBase = 110.f |
| Center of rotation to RearWheel. More... | |
| Public Attributes inherited from URobotVehicleMovementComponent | |
| ARRBaseRobot * | OwnerVehicle = nullptr |
| TObjectPtr< URRFloatingMovementComponent > | AIMovementComp = nullptr |
| FVector | AngularVelocity = FVector::ZeroVector |
| [deg/s] AngularVelocity control input for [UpdatedComponent] More... | |
| FVector | DesiredMovement = FVector::ZeroVector |
| Desired position calculated from deltatime and UpdatedComponent::ComponentVelocity. More... | |
| FQuat | DesiredRotation = FQuat::Identity |
| Desired orientation calculated from deltatime and AngularVelocity. More... | |
| float | RayOffsetUp = 10.f |
| Ray start Z offset. Value must be > possible penetration of objects in contact point, in one tick. More... | |
| float | RayOffsetDown = 20.f |
| Ray end Z offset. More... | |
| bool | bAdaptToSurfaceBelow = true |
| to activate/deactivate floor checks to stick the robot on its surface below More... | |
| int8 | InversionFactor = 1 |
| float | MinDistanceToFloor = 0.f |
| [cm] Z distance between the robot root location and the floor, used when less than 3 contact points are defined More... | |
| float | FallingSpeed = 100.f |
| [cm/s] How much the robot falls if no floor beneath ( FallingSpeed * DeltaTime ) More... | |
| URRBaseOdomComponent * | OdomComponent = nullptr |
| Odometry source. More... | |
Protected Attributes | |
| float | PrevWheeAngleRad = 0.f |
| [rad] More... | |
| Protected Attributes inherited from URobotVehicleMovementComponent | |
| float | LogLastHit = 0.f |
| internal property used to log throttle. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from URobotVehicleMovementComponent | |
| virtual bool | IsSupportedForNetworking () const override |
| virtual void | UpdateMovement (float InDeltaTime) |
| Move actor by using SafeMoveUpdatedComponent and SlideAlongSurface. More... | |
Detailed Description
Kinematic Tricycle Drive component class.
Simulate kinematic tricycle drive by using 2 URRJointComponent SteeringJoint + DriveJoint.
UCLASS(ClassGroup = (Custom), meta = (BlueprintSpawnableComponent))
Member Function Documentation
◆ BeginPlay()
| void URRKinematicTricycleDriveComponent::BeginPlay | ( | ) |
◆ SetDriveJoints()
| void URRKinematicTricycleDriveComponent::SetDriveJoints | ( | URRJointComponent * | InSteeringJoint, |
| URRJointComponent * | InDriveJoint | ||
| ) |
◆ TickComponent()
|
virtual |
Call UpdateMovement, and UpdateComponentVelocity.
- Parameters
-
DeltaTime TickType ThisTickFunction
- See also
Reimplemented from URobotVehicleMovementComponent.
Member Data Documentation
◆ DriveJoint
| URRJointComponent* URRKinematicTricycleDriveComponent::DriveJoint = nullptr |
◆ PrevWheeAngleRad
|
protected |
[rad]
◆ SteeringJoint
| URRJointComponent* URRKinematicTricycleDriveComponent::SteeringJoint = nullptr |
◆ WheelBase
| float URRKinematicTricycleDriveComponent::WheelBase = 110.f |
Center of rotation to RearWheel.
◆ WheelRadius
| float URRKinematicTricycleDriveComponent::WheelRadius = 12.7f |
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rapyutasimulationplugins/checkouts/devel/Source/RapyutaSimulationPlugins/Public/Drives/RRKinematicTricycleDriveComponent.h
