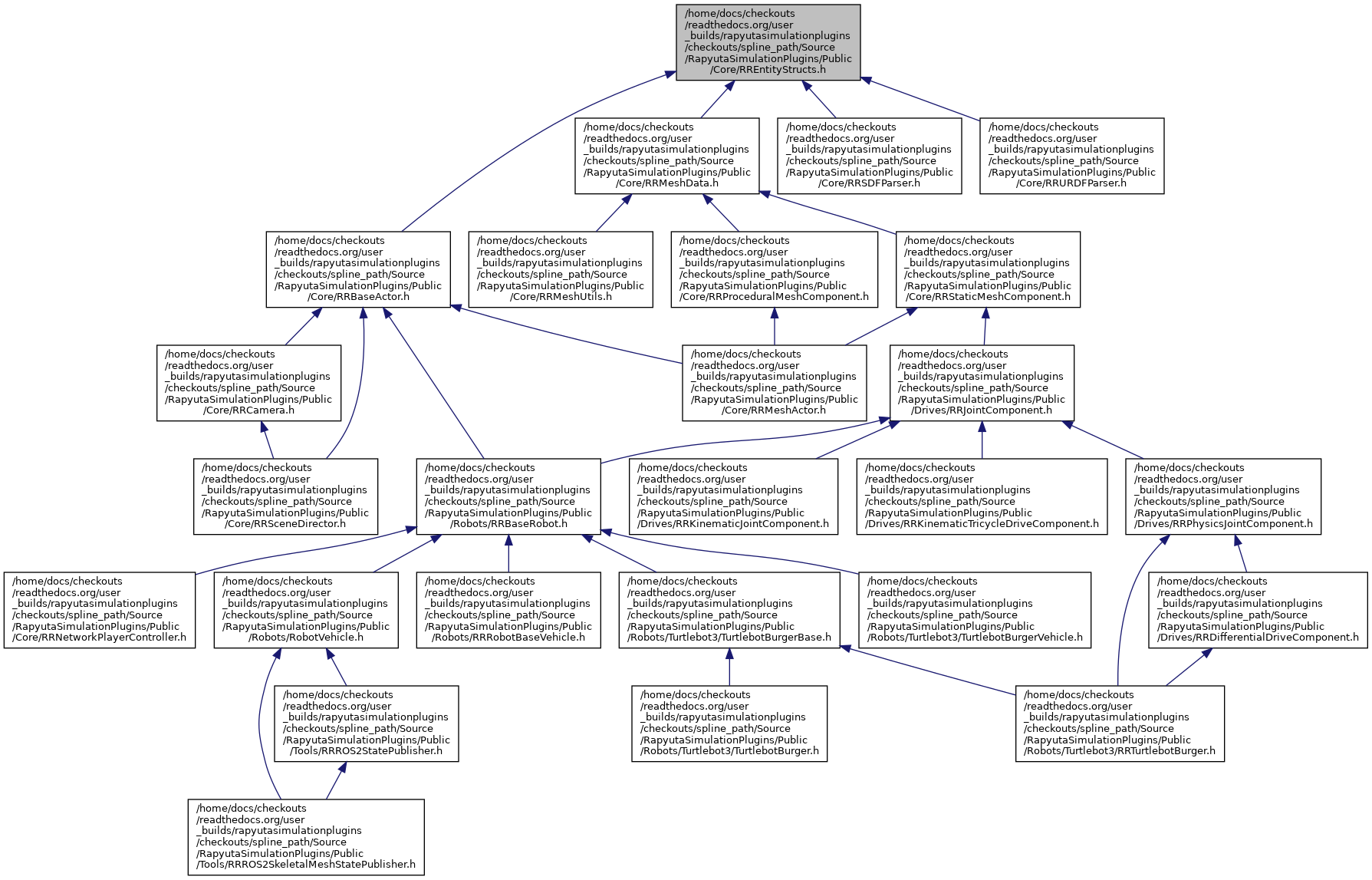
Contains various commonly used struct definitions for robot & object entities.
More...
|
| struct | FRRRobotJointDynamicProperties |
| |
| struct | FRRRobotJointProperty |
| | The FRRRobotJointProperty struct. More...
|
| |
| struct | FRRRobotJointValue |
| | Joint value struct, mainly to directly store input values from ROS cmds, thus units are in SI to avoid conversion overheads. More...
|
| |
| struct | FRRRobotLinkInertia |
| |
| struct | FRREntityGeometryInfo |
| |
| struct | FRRSensorBaseInfo |
| | Sensor base info which includes essential base attributes such as Topic name, frame id, publication rate. More...
|
| |
| struct | FRRSensorLidarInfo |
| | Sensor lidar info. More...
|
| |
| struct | FRRSensorProperty |
| |
| struct | FRRRobotLinkProperty |
| |
| struct | FRRRobotWheelProperty |
| | Wheel property for the robot, used to store configurations for runtime #UChaosVehicleWheel setup. More...
|
| |
| class | URRRobotNode |
| |
| struct | FRREntityTreeLayer |
| |
| struct | FRREntityModelData |
| | Core UE struct housing entity (robot, object) model data, wrapped by FRREntityModelInfo & FRREntityModelTableRow. More...
|
| |
| class | UBPRREntityModelData |
| | BP Wrapper of FRREntityModelData. More...
|
| |
| struct | FRREntityModelTableRow |
| | Struct, inheriting from #FTableRowBase, storing entry data for #UDataTable. More...
|
| |
| struct | FRREntityModelInfo |
| | Plain struct wrapping robot model data (FRREntityModelData), being thread-safe accessible through TSharedRef if created with TSharedPtr. More...
|
| |
| class | FRREntityDescriptionParser |
| | This class will co-parent with [IFastXmlCallback], which is not a USTRUCT. More...
|
| |
Contains various commonly used struct definitions for robot & object entities.
- Copyright
- Copyright 2020-2023 Rapyuta Robotics Co., Ltd.