Odometry Topic and TF publisher of ARRBaseRobot. More...
#include <RRROS2OdomPublisher.h>
Inheritance diagram for URRROS2OdomPublisher:
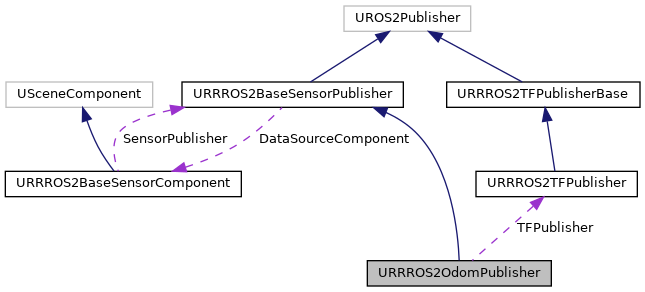
Collaboration diagram for URRROS2OdomPublisher:
Public Member Functions | |
| URRROS2OdomPublisher () | |
| Construct a new URRROS2OdomPublisher object. More... | |
| virtual bool | InitializeWithROS2 (UROS2NodeComponent *InROS2Node) override |
| void | InitializeTFWithROS2 (UROS2NodeComponent *InROS2Node) |
| void | UpdateMessage (UROS2GenericMsg *InMessage) override |
| bool | GetOdomData (FROSOdom &OutOdomData) const |
| Convert UE->ROS, Append Namespace to ChildFrameId and update TF data. More... | |
 Public Member Functions inherited from URRROS2BaseSensorPublisher Public Member Functions inherited from URRROS2BaseSensorPublisher | |
| URRROS2BaseSensorPublisher () | |
Public Attributes | |
| URRROS2TFPublisher * | TFPublisher = nullptr |
| bool | bPublishOdomTf = false |
| Publish tf or not. More... | |
| bool | bAppendNodeNamespace = true |
| add robot name to the frame_id and ChildFrameId or not. More... | |
| Public Attributes inherited from URRROS2BaseSensorPublisher | |
| URRROS2BaseSensorComponent * | DataSourceComponent = nullptr |
Detailed Description
Odometry Topic and TF publisher of ARRBaseRobot.
- See also
- UROS2Publisher
UCLASS(ClassGroup = (Custom), Blueprintable, meta = (BlueprintSpawnableComponent))
Constructor & Destructor Documentation
◆ URRROS2OdomPublisher()
| URRROS2OdomPublisher::URRROS2OdomPublisher | ( | ) |
Construct a new URRROS2OdomPublisher object.
Member Function Documentation
◆ GetOdomData()
| bool URRROS2OdomPublisher::GetOdomData | ( | FROSOdom & | OutOdomData | ) | const |
Convert UE->ROS, Append Namespace to ChildFrameId and update TF data.
- Parameters
-
OutOdomData
- Returns
- true
- false
◆ InitializeTFWithROS2()
| void URRROS2OdomPublisher::InitializeTFWithROS2 | ( | UROS2NodeComponent * | InROS2Node | ) |
◆ InitializeWithROS2()
|
overridevirtual |
◆ UpdateMessage()
|
overridevirtual |
Reimplemented from URRROS2BaseSensorPublisher.
Member Data Documentation
◆ bAppendNodeNamespace
| bool URRROS2OdomPublisher::bAppendNodeNamespace = true |
add robot name to the frame_id and ChildFrameId or not.
◆ bPublishOdomTf
| bool URRROS2OdomPublisher::bPublishOdomTf = false |
Publish tf or not.
◆ TFPublisher
| URRROS2TFPublisher* URRROS2OdomPublisher::TFPublisher = nullptr |
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rapyutasimulationplugins/checkouts/devel/Source/RapyutaSimulationPlugins/Public/Tools/RRROS2OdomPublisher.h
