ROS 2 GameMode which have Clock publisher and ROS 2 services to interact with ROS 2. More...
#include <RRROS2GameMode.h>
Public Member Functions | |
| ARRROS2GameMode () | |
| virtual void | SetFixedTimeStep (const float InStepSize) |
| Set timestep by FApp::SetFixedDeltaTime. More... | |
| virtual float | GetFixedTimeStep () const |
| Get timestep. More... | |
| virtual void | SetTargetRTF (const float InTargetRTF) |
| Set the Target RTF. This works if CustomTimeStep class is URRLimitRTFFixedSizeCustomTimeStep. More... | |
| virtual float | GetTargetRTF () const |
| Get the Target RTF. This works if CustomTimeStep class is URRLimitRTFFixedSizeCustomTimeStep. More... | |
| virtual void | PrintSimConfig () const |
| Print GameMode's user configs in INI. More... | |
| FString | GetSpawnableNativeEntityClassPath (const FString &InEntityModelName) const |
| Get corresponding class path of a native entity model from NativeSpawnableClassPaths. More... | |
Public Attributes | |
| UROS2NodeComponent * | MainROS2Node = nullptr |
| Sim's Main ROS 2 node. This is not used by client-server and ARRNetworkPlayerController has ROS2Node instead. More... | |
| FString | MainROS2NodeName = TEXT("UEROS2Node") |
| Sim's Main ROS 2 node name. This is not used by client-server and ARRNetworkPlayerController has ROS2Node instead. More... | |
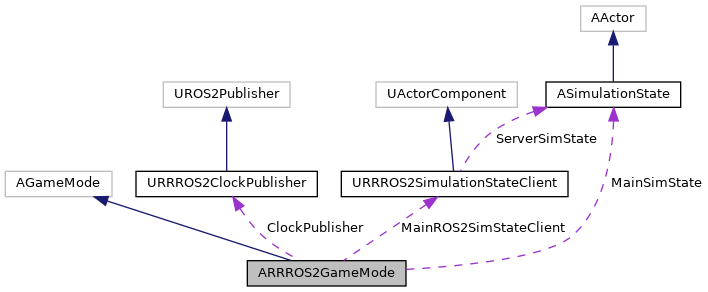
| URRROS2ClockPublisher * | ClockPublisher = nullptr |
| Publish /clock. This is not used by client-server without editor and ARRNetworkPlayerController has ClockPublisher instead. More... | |
| ASimulationState * | MainSimState = nullptr |
| Provide ROS 2 implementation of sim-wide operations like get/set actor state, spawn/delete actor, attach/detach actor. More... | |
| URRROS2SimulationStateClient * | MainROS2SimStateClient = nullptr |
| Provide ROS 2 interface of sim-wide operations implemented by MainSimState. More... | |
| TSubclassOf< URRROS2SimulationStateClient > | ROS2SimStateClientClass = URRROS2SimulationStateClient::StaticClass() |
| Custom type to instantiate MainROS2SimStateClient, configurable in child classes. More... | |
| FRROnROS2Initialized | OnROS2Initialized |
| Delegate signalling ROS 2 having been initialized with MainROS2Node, MainROS2SimStateClient, ClockPublisher ready. More... | |
Protected Member Functions | |
| virtual void | InitGame (const FString &InMapName, const FString &InOptions, FString &OutErrorMessage) override |
| Initialize Game. More... | |
| virtual void | InitSim () |
| Create MainSimState and call InitROS2. More... | |
| virtual void | StartPlay () override |
| Set timestep with startplay and call InitSim. More... | |
Protected Attributes | |
| TArray< FString > | BPSpawnableClassNames |
| Blueprint class names (also used as their entity model names) to be registered as spawnable entity types. More... | |
| TMap< FString, FString > | NativeSpawnableClassPaths |
| Asset paths of classes to be registered as spawnable entity types. More... | |
Private Member Functions | |
| void | InitROS2 () |
| Create and initialize MainROS2Node, ClockPublisher and MainSimState. More... | |
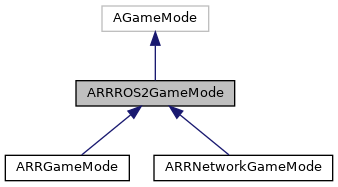
Detailed Description
ROS 2 GameMode which have Clock publisher and ROS 2 services to interact with ROS 2.
- See also
- AGameMode
- GameMode and GameState
Constructor & Destructor Documentation
◆ ARRROS2GameMode()
| ARRROS2GameMode::ARRROS2GameMode | ( | ) |
Member Function Documentation
◆ GetFixedTimeStep()
|
virtual |
◆ GetSpawnableNativeEntityClassPath()
|
inline |
Get corresponding class path of a native entity model from NativeSpawnableClassPaths.
◆ GetTargetRTF()
|
virtual |
Get the Target RTF. This works if CustomTimeStep class is URRLimitRTFFixedSizeCustomTimeStep.
- Returns
- float
◆ InitGame()
|
overrideprotectedvirtual |
◆ InitROS2()
|
private |
Create and initialize MainROS2Node, ClockPublisher and MainSimState.
◆ InitSim()
|
protectedvirtual |
Create MainSimState and call InitROS2.
◆ PrintSimConfig()
|
virtual |
Print GameMode's user configs in INI.
Reimplemented in ARRGameMode.
◆ SetFixedTimeStep()
|
virtual |
Set timestep by FApp::SetFixedDeltaTime.
- Parameters
-
InFrequency game time update frequency, timestep become 1/frequency.
- Attention
- FApp::SetFixedDeltaTime take arg as double but InFreqency is float to be able to access from BP.
◆ SetTargetRTF()
|
virtual |
Set the Target RTF. This works if CustomTimeStep class is URRLimitRTFFixedSizeCustomTimeStep.
- Parameters
-
InTargetRTF
◆ StartPlay()
|
overrideprotectedvirtual |
Set timestep with startplay and call InitSim.
Reimplemented in ARRGameMode.
Member Data Documentation
◆ BPSpawnableClassNames
|
protected |
Blueprint class names (also used as their entity model names) to be registered as spawnable entity types.
Eg: {"BP_TurtlebotBurger", "BP_TurtlebotBurgerVehicle"}
◆ ClockPublisher
| URRROS2ClockPublisher* ARRROS2GameMode::ClockPublisher = nullptr |
Publish /clock. This is not used by client-server without editor and ARRNetworkPlayerController has ClockPublisher instead.
◆ MainROS2Node
| UROS2NodeComponent* ARRROS2GameMode::MainROS2Node = nullptr |
Sim's Main ROS 2 node. This is not used by client-server and ARRNetworkPlayerController has ROS2Node instead.
◆ MainROS2NodeName
| FString ARRROS2GameMode::MainROS2NodeName = TEXT("UEROS2Node") |
Sim's Main ROS 2 node name. This is not used by client-server and ARRNetworkPlayerController has ROS2Node instead.
◆ MainROS2SimStateClient
| URRROS2SimulationStateClient* ARRROS2GameMode::MainROS2SimStateClient = nullptr |
Provide ROS 2 interface of sim-wide operations implemented by MainSimState.
- Note
- ASimulationState and URRROS2SimulationStateClient are separated to be used in client-server.
◆ MainSimState
| ASimulationState* ARRROS2GameMode::MainSimState = nullptr |
Provide ROS 2 implementation of sim-wide operations like get/set actor state, spawn/delete actor, attach/detach actor.
◆ NativeSpawnableClassPaths
|
protected |
Asset paths of classes to be registered as spawnable entity types.
Eg: {{"TurtlebotBurger", "/Script/RapyutaSimulationPlugins.TurtlebotBurger"]}
◆ OnROS2Initialized
| FRROnROS2Initialized ARRROS2GameMode::OnROS2Initialized |
Delegate signalling ROS 2 having been initialized with MainROS2Node, MainROS2SimStateClient, ClockPublisher ready.
◆ ROS2SimStateClientClass
| TSubclassOf<URRROS2SimulationStateClient> ARRROS2GameMode::ROS2SimStateClientClass = URRROS2SimulationStateClient::StaticClass() |
Custom type to instantiate MainROS2SimStateClient, configurable in child classes.
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rapyutasimulationplugins/checkouts/devel/Source/RapyutaSimulationPlugins/Public/Core/RRROS2GameMode.h
