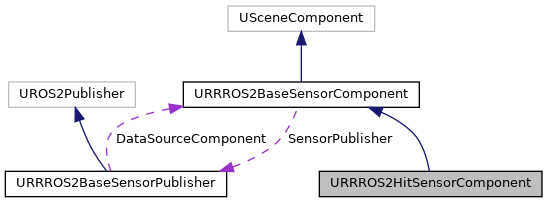
Publish Hit status with OnActorHit and OnComponentHit.
More...
#include <RRROS2HitSensorComponent.h>
|
| | URRROS2HitSensorComponent () |
| | Construct a new URRROS2HitSensorComponent object. More...
|
| |
| void | BeginPlay () override |
| |
| virtual void | BindCallback (UObject *InTargetObject) |
| | Bind OnActorHit and OnComponentHit delegate with TargetObjects. More...
|
| |
| virtual void | OnHit (AActor *SelfActor, AActor *OtherActor, FVector NormalImpulse, const FHitResult &Hit, const FString &Name=TEXT("")) |
| | Common hit process called from OnTargetComponentHit and OnTargetActorHit. More...
|
| |
| virtual void | OnTargetComponentHit (UPrimitiveComponent *HitComp, AActor *OtherActor, UPrimitiveComponent *OtherComp, FVector NormalImpulse, const FHitResult &Hit) |
| |
| virtual void | OnTargetActorHit (AActor *SelfActor, AActor *OtherActor, FVector NormalImpulse, const FHitResult &Hit) |
| |
| virtual void | SetROS2Msg (UROS2GenericMsg *InMessage) override |
| | Set result of #GetROS2Data to InMessage. More...
|
| |
| bool | IsIgnore (AActor *SelfActor, AActor *OtherActor, UPrimitiveComponent *OtherComp) |
| |
| | URRROS2BaseSensorComponent () |
| | Construct a new URRROS2BaseSensorComponent object. More...
|
| |
| virtual void | InitalizeWithROS2 (UROS2NodeComponent *InROS2Node, const FString &InPublisherName=TEXT(""), const FString &InTopicName=TEXT(""), const UROS2QoS InQoS=UROS2QoS::SensorData) |
| | Create and initialize publisher and start sensor update by calling. More...
|
| |
| virtual void | CreatePublisher (const FString &InPublisherName=TEXT("")) |
| | Create a Publisher with SensorPublisherClass. More...
|
| |
| virtual void | PreInitializePublisher (UROS2NodeComponent *InROS2Node, const FString &InTopicName=TEXT("")) |
| | Set publish frequency, topic name and FrameId. More...
|
| |
| virtual void | InitializePublisher (UROS2NodeComponent *InROS2Node, const UROS2QoS InQoS=UROS2QoS::SensorData) |
| | Initialize Sensorpublisher by using UROS2Publisher's methods. More...
|
| |
| virtual void | Run () |
| | Start timer to update and publish sensor data by using SetTimer. More...
|
| |
| virtual void | Stop () |
| | Stop timer to update and publish sensor data by using ClearTimer. More...
|
| |
| virtual void | SensorUpdate () |
| | Update Sensor data. This method should be overwritten by child class. More...
|
| |
Publish Hit status with OnActorHit and OnComponentHit.
Publish event when hit event happened from TargetObjects
UCLASS(ClassGroup = (Custom), Blueprintable, meta = (BlueprintSpawnableComponent))
◆ URRROS2HitSensorComponent()
| URRROS2HitSensorComponent::URRROS2HitSensorComponent |
( |
| ) |
|
|
inline |
◆ BeginPlay()
| void URRROS2HitSensorComponent::BeginPlay |
( |
| ) |
|
|
override |
◆ BindCallback()
| virtual void URRROS2HitSensorComponent::BindCallback |
( |
UObject * |
InTargetObject | ) |
|
|
virtual |
◆ IsIgnore()
| bool URRROS2HitSensorComponent::IsIgnore |
( |
AActor * |
SelfActor, |
|
|
AActor * |
OtherActor, |
|
|
UPrimitiveComponent * |
OtherComp |
|
) |
| |
◆ OnHit()
| virtual void URRROS2HitSensorComponent::OnHit |
( |
AActor * |
SelfActor, |
|
|
AActor * |
OtherActor, |
|
|
FVector |
NormalImpulse, |
|
|
const FHitResult & |
Hit, |
|
|
const FString & |
Name = TEXT("") |
|
) |
| |
|
virtual |
◆ OnTargetActorHit()
| virtual void URRROS2HitSensorComponent::OnTargetActorHit |
( |
AActor * |
SelfActor, |
|
|
AActor * |
OtherActor, |
|
|
FVector |
NormalImpulse, |
|
|
const FHitResult & |
Hit |
|
) |
| |
|
virtual |
◆ OnTargetComponentHit()
| virtual void URRROS2HitSensorComponent::OnTargetComponentHit |
( |
UPrimitiveComponent * |
HitComp, |
|
|
AActor * |
OtherActor, |
|
|
UPrimitiveComponent * |
OtherComp, |
|
|
FVector |
NormalImpulse, |
|
|
const FHitResult & |
Hit |
|
) |
| |
|
virtual |
◆ SetROS2Msg()
| virtual void URRROS2HitSensorComponent::SetROS2Msg |
( |
UROS2GenericMsg * |
InMessage | ) |
|
|
overridevirtual |
◆ bIgnoreSelf
| bool URRROS2HitSensorComponent::bIgnoreSelf = true |
◆ Data
| FROSHitEvent URRROS2HitSensorComponent::Data |
◆ IgnoreList
| TArray<UObject*> URRROS2HitSensorComponent::IgnoreList |
◆ TargetObjects
| TArray<UObject*> URRROS2HitSensorComponent::TargetObjects |
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rapyutasimulationplugins/checkouts/devel/Source/RapyutaSimulationPlugins/Public/Sensors/RRROS2HitSensorComponent.h
 Public Member Functions inherited from URRROS2BaseSensorComponent
Public Member Functions inherited from URRROS2BaseSensorComponent