Base Robot class. Other robot class can inherit from this class. More...
#include "Components/StaticMeshComponent.h"#include "Components/WidgetComponent.h"#include "CoreMinimal.h"#include "ROS2NodeComponent.h"#include "Core/RRBaseActor.h"#include "Core/RRObjectCommon.h"#include "Drives/RRJointComponent.h"#include "Drives/RobotVehicleMovementComponent.h"#include "Sensors/RRROS2BaseSensorComponent.h"#include "Tools/ROS2Spawnable.h"#include "Tools/RRUIWidgetComponent.h"#include "RRBaseRobot.generated.h"
Include dependency graph for RRBaseRobot.h:

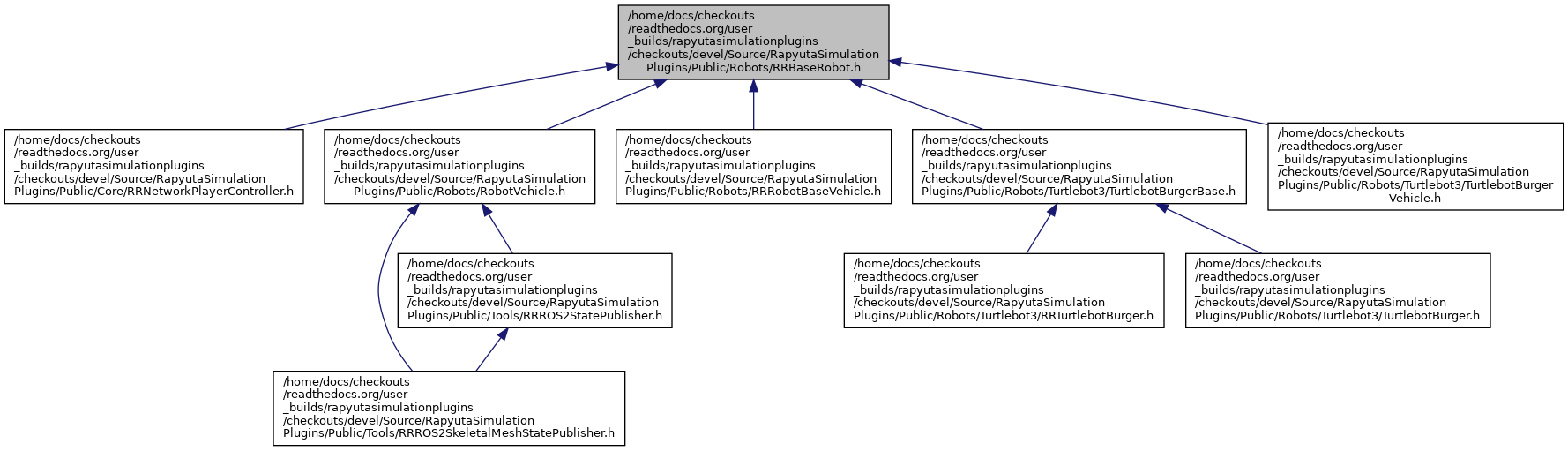
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ARRBaseRobot |
| Base Robot class. Other robot class should inherit from this class. More... | |
Macros | |
| #define | RR_VERIFY_DYNAMIC_ROBOT(InRobot) |
| #define | RR_VERIFY_STATIC_BP_ROBOT(InRobot) |
| #define | RR_VERIFY_DYNAMIC_OR_STATIC_BP_ROBOT(InRobot) |
Enumerations | |
| enum | ERRNetworkAuthorityType : uint8 { ERRNetworkAuthorityType::SERVER, ERRNetworkAuthorityType::CLIENT } |
| Which server or client has robot movement authority. More... | |
Functions | |
| if (InRobot &&(false==InRobot->IsDynamicRuntimeRobot())) | |
| if (InRobot &&(false==InRobot->IsStaticBPRobot())) | |
| DECLARE_MULTICAST_DELEGATE_OneParam (FOnRobotCreationDone, bool) | |
Detailed Description
Base Robot class. Other robot class can inherit from this class.
- Copyright
- Copyright 2020-2022 Rapyuta Robotics Co., Ltd.
Macro Definition Documentation
◆ RR_VERIFY_DYNAMIC_OR_STATIC_BP_ROBOT
| #define RR_VERIFY_DYNAMIC_OR_STATIC_BP_ROBOT | ( | InRobot | ) |
◆ RR_VERIFY_DYNAMIC_ROBOT
| #define RR_VERIFY_DYNAMIC_ROBOT | ( | InRobot | ) |
◆ RR_VERIFY_STATIC_BP_ROBOT
| #define RR_VERIFY_STATIC_BP_ROBOT | ( | InRobot | ) |
Enumeration Type Documentation
◆ ERRNetworkAuthorityType
|
strong |
Which server or client has robot movement authority.
- Todo:
- Implement Server authority.
Function Documentation
◆ DECLARE_MULTICAST_DELEGATE_OneParam()
| DECLARE_MULTICAST_DELEGATE_OneParam | ( | FOnRobotCreationDone | , |
| bool | |||
| ) |
◆ if() [1/2]
| if | ( | InRobot && | false==InRobot->IsDynamicRuntimeRobot() | ) |
◆ if() [2/2]
| if | ( | InRobot && | false==InRobot->IsStaticBPRobot() | ) |
