IMU sensor components which publish Orienation, AngularVelocity, LinearAcceleration. More...
#include <RRROS2IMUComponent.h>
Inheritance diagram for URRROS2IMUComponent:
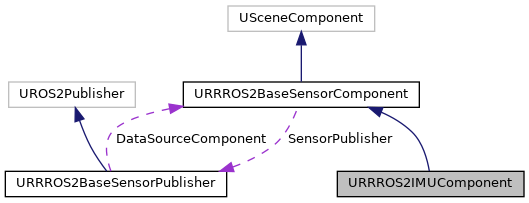
Collaboration diagram for URRROS2IMUComponent:
Public Member Functions | |
| URRROS2IMUComponent () | |
| Construct a new URRROS2IMUComponent object. More... | |
| void | BeginPlay () override |
| virtual void | SensorUpdate () override |
| Calculate IMU data, i.e. Orienation, AngularVelocity, LinearAcceleration. More... | |
| virtual void | Reset () |
| Initialize sensor data. More... | |
| virtual FROSImu | GetROS2Data () |
| return Data More... | |
| virtual void | SetROS2Msg (UROS2GenericMsg *InMessage) override |
| Set result of GetROS2Data to InMessage. More... | |
 Public Member Functions inherited from URRROS2BaseSensorComponent Public Member Functions inherited from URRROS2BaseSensorComponent | |
| URRROS2BaseSensorComponent () | |
| Construct a new URRROS2BaseSensorComponent object. More... | |
| virtual void | InitalizeWithROS2 (UROS2NodeComponent *InROS2Node, const FString &InPublisherName=TEXT(""), const FString &InTopicName=TEXT(""), const UROS2QoS InQoS=UROS2QoS::SensorData) |
| Create and initialize publisher and start sensor update by calling. More... | |
| virtual void | CreatePublisher (const FString &InPublisherName=TEXT("")) |
| Create a Publisher with SensorPublisherClass. More... | |
| virtual void | PreInitializePublisher (UROS2NodeComponent *InROS2Node, const FString &InTopicName=TEXT("")) |
| Set publish frequency, topic name and FrameId. More... | |
| virtual void | InitializePublisher (UROS2NodeComponent *InROS2Node, const UROS2QoS InQoS=UROS2QoS::SensorData) |
| Initialize Sensorpublisher by using UROS2Publisher's methods. More... | |
| virtual void | Run () |
| Start timer to update and publish sensor data by using SetTimer. More... | |
| virtual void | Stop () |
| Stop timer to update and publish sensor data by using ClearTimer. More... | |
Public Attributes | |
| FTransform | InitialTransform = FTransform::Identity |
| FVector | LinearAcceleration = FVector::ZeroVector |
| FVector | AngularVelocity = FVector::ZeroVector |
| FQuat | Orientation = FQuat::Identity |
| TObjectPtr< URRGaussianNoise > | LinearAccelerationNoise |
| float | NoiseMeanLinearAcceleration = 0.f |
| float | NoiseVarianceLinearAcceleration = 0.05f |
| TObjectPtr< URRGaussianNoise > | OrientationNoise |
| float | NoiseMeanOrientation = 0.f |
| float | NoiseVarianceOrientation = 0.01f |
| float | OrientationNoiseDriftCoefficient = 0.0f |
| TObjectPtr< URRGaussianNoise > | AngularVelocityNoise |
| float | NoiseMeanAngularVelocity = 0.f |
| float | NoiseVarianceAngularVelocity = 0.01f |
| FROSImu | Data |
| Public Attributes inherited from URRROS2BaseSensorComponent | |
| TSubclassOf< UROS2Publisher > | SensorPublisherClass = URRROS2BaseSensorPublisher::StaticClass() |
| URRROS2BaseSensorPublisher * | SensorPublisher = nullptr |
| TSubclassOf< UROS2GenericMsg > | MsgClass = UROS2GenericMsg::StaticClass() |
| FString | TopicName = TEXT("sensor_data") |
| FString | FrameId = TEXT("sensor_frame") |
| int32 | PublicationFrequencyHz = 30 |
| bool | bAppendNodeNamespace = true |
| Append namespace to FrameId or not. More... | |
| bool | bIsValid = true |
Protected Attributes | |
| FVector | OffsetOrientation = FVector::ZeroVector |
| FVector | OrientationNoiseSum = FVector::ZeroVector |
| FTransform | LastTransform = FTransform::Identity |
| FVector | LastLinearVel = FVector::ZeroVector |
| FTransform | LastdT = FTransform::Identity |
| float | LastSensorUpdateTime |
| Protected Attributes inherited from URRROS2BaseSensorComponent | |
| FTimerHandle | TimerHandle |
Detailed Description
IMU sensor components which publish Orienation, AngularVelocity, LinearAcceleration.
UCLASS(ClassGroup = (Custom), Blueprintable, meta = (BlueprintSpawnableComponent))
Constructor & Destructor Documentation
◆ URRROS2IMUComponent()
| URRROS2IMUComponent::URRROS2IMUComponent | ( | ) |
Construct a new URRROS2IMUComponent object.
Member Function Documentation
◆ BeginPlay()
|
override |
◆ GetROS2Data()
|
virtual |
◆ Reset()
|
virtual |
Initialize sensor data.
◆ SensorUpdate()
|
overridevirtual |
Calculate IMU data, i.e. Orienation, AngularVelocity, LinearAcceleration.
Reimplemented from URRROS2BaseSensorComponent.
◆ SetROS2Msg()
|
overridevirtual |
Set result of GetROS2Data to InMessage.
- Parameters
-
InMessage
Reimplemented from URRROS2BaseSensorComponent.
Member Data Documentation
◆ AngularVelocity
| FVector URRROS2IMUComponent::AngularVelocity = FVector::ZeroVector |
◆ AngularVelocityNoise
| TObjectPtr<URRGaussianNoise> URRROS2IMUComponent::AngularVelocityNoise |
◆ Data
| FROSImu URRROS2IMUComponent::Data |
◆ InitialTransform
| FTransform URRROS2IMUComponent::InitialTransform = FTransform::Identity |
◆ LastdT
|
protected |
◆ LastLinearVel
|
protected |
◆ LastSensorUpdateTime
|
protected |
◆ LastTransform
|
protected |
◆ LinearAcceleration
| FVector URRROS2IMUComponent::LinearAcceleration = FVector::ZeroVector |
◆ LinearAccelerationNoise
| TObjectPtr<URRGaussianNoise> URRROS2IMUComponent::LinearAccelerationNoise |
◆ NoiseMeanAngularVelocity
| float URRROS2IMUComponent::NoiseMeanAngularVelocity = 0.f |
◆ NoiseMeanLinearAcceleration
| float URRROS2IMUComponent::NoiseMeanLinearAcceleration = 0.f |
◆ NoiseMeanOrientation
| float URRROS2IMUComponent::NoiseMeanOrientation = 0.f |
◆ NoiseVarianceAngularVelocity
| float URRROS2IMUComponent::NoiseVarianceAngularVelocity = 0.01f |
◆ NoiseVarianceLinearAcceleration
| float URRROS2IMUComponent::NoiseVarianceLinearAcceleration = 0.05f |
◆ NoiseVarianceOrientation
| float URRROS2IMUComponent::NoiseVarianceOrientation = 0.01f |
◆ OffsetOrientation
|
protected |
◆ Orientation
| FQuat URRROS2IMUComponent::Orientation = FQuat::Identity |
◆ OrientationNoise
| TObjectPtr<URRGaussianNoise> URRROS2IMUComponent::OrientationNoise |
◆ OrientationNoiseDriftCoefficient
| float URRROS2IMUComponent::OrientationNoiseDriftCoefficient = 0.0f |
◆ OrientationNoiseSum
|
protected |
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rapyutasimulationplugins/checkouts/devel/Source/RapyutaSimulationPlugins/Public/Sensors/RRROS2IMUComponent.h
